FRAMER
The objective of this project is to propose strategies for creating inhabitable spaces using inflatables in ex treme desert environments, while leveraging the desert's onsite materials and exploring their material properties. (AADRL Thesis Project, TEAM WORK)
Nature as Technology, empowering natural phenomena through the use of robots and automation. Utilize inflatable robots to create formwork, and let the dynamic process of sand accumulation determine the formation. Create spaces in extreme environments, becoming a moving landscape.
Aggregation strategy is the main part of the system to make judgments based on site feedback. The system takes wind direction and slope as the main considerations based on the use of materials and the desert environment, and selects relatively gentle areas with low wind speeds as suitable sites.
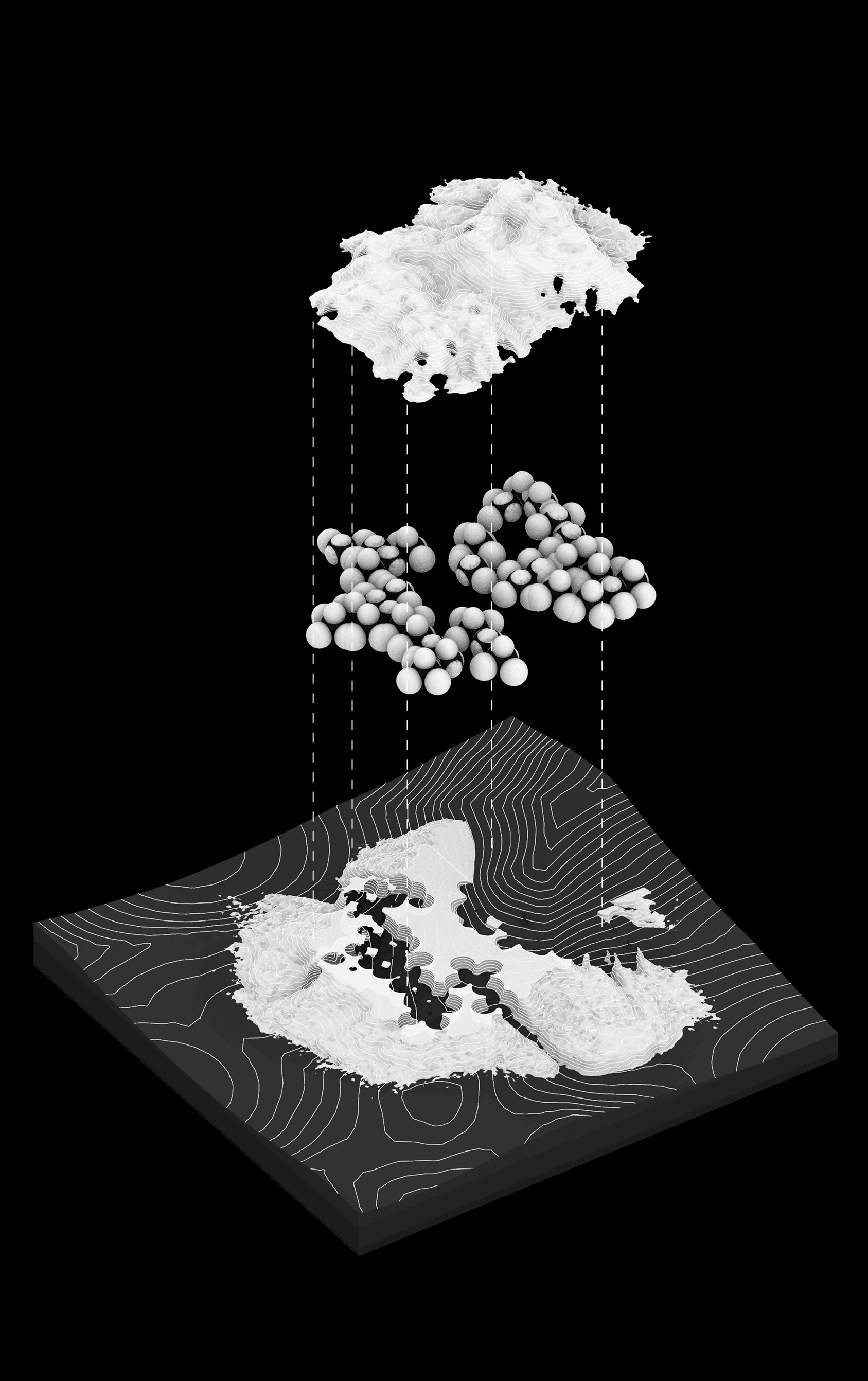
Inflation behavior is an important part of the system to create space. The mold is composed of agents in different expansion states. The robot decides whether to connect based on its expansion state, generating multiple design options. The system filters out the results according to the requirements.

Space Formation
To solidify loose sand and maintain surface geometry, we found that spraying with sodium thiosulphate salt is the best technique. This combines the natural process of soil crystallization and creates a strong adhesive for sand particles.


In the end
The proposal has five stages. First, the system locates a suitable site for the aggregation of agents based on user needs, wind, and sand moving direction. Then, each agent is inflated accordingly, and the result that fits the available space is chosen. Next , the agent sprays sand and salt water to construct the residence. Once the sand solidifies, it forms a nomadic desert dwelling that incorporates the void space left by agency.
Framer 2023
Amsterdam